Latest ●
Object Manipulation ●
Sensor Coverage ●
Multi-Robot Motion Planning ●
Target Assignment ●
Informative Path Planning ●
Situational Awareness ●
Distributed Consensus
Optimal Multi-Sensor Coverage
Optimal Guarding of 3D Embedded Surfaces
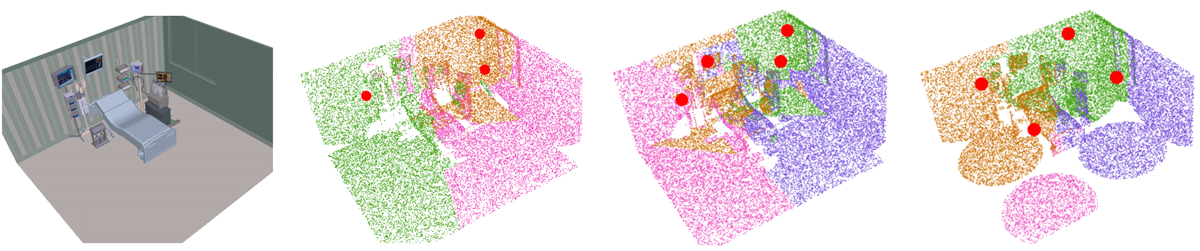
Sensor Placement for Globally Optimal Coverage of 3D-Embedded Surfaces. S. W. Feng,
K. Gao, J. Gong, and J. Yu. 2021 IEEE International Conference on Robotics and
Automation (ICRA 2021).
Optimal Region Guarding
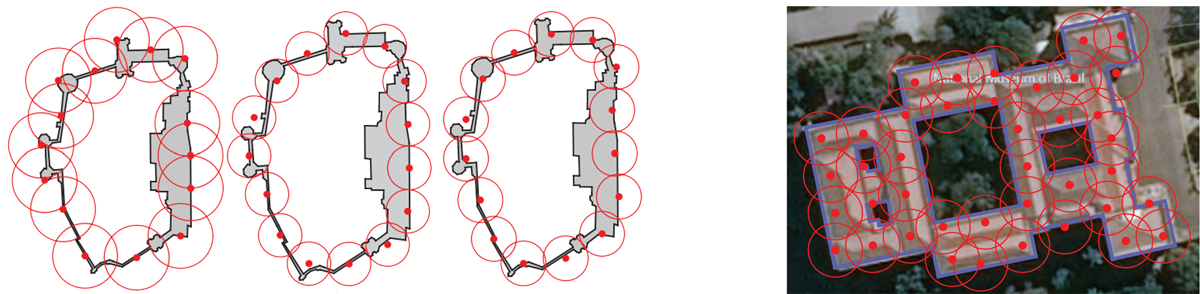
Optimally Guarding Perimeters and Regions with Mobile Range Sensors.
S. W. Feng and J. Yu. 2020 Robotics: Science and Systems (RSS 2020).
Optimal Perimeter Guarding

Efficient Algorithms for Optimal Perimeter Guarding. S. W. Feng, S. D. Han,
K. Gao, and J. Yu. 2019 Robotics: Science and Systems (RSS 2019).
Heterogenerous sensors paper ● video
Optimal Perimeter Guarding with Heterogeneous Robot Teams: Complexity Analysis
and Effective Algorithms. S. W. Feng and J. Yu. IEEE Robotics and Automation
Letters, 5(2), page(s): 430-437, 2020.