Latest ●
Object Manipulation ●
Sensor Coverage ●
Multi-Robot Motion Planning ●
Target Assignment ●
Informative Path Planning ●
Situational Awareness ●
Distributed Consensus
Distributed Consensus
Consensus under Minimal Sensing and Quantized Control
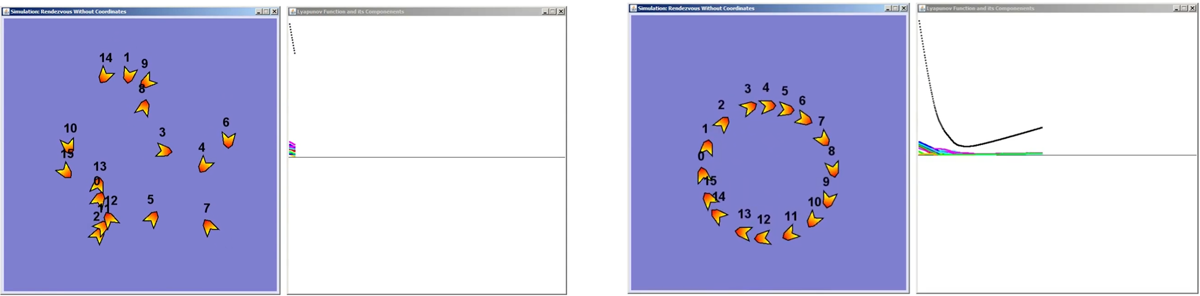
The simulation shows that the rendezvous behavior of the 16 Dubins car vehicles depends on a single 'windshield' angle. Note that this simulation only deals with the key case of cyclic pursuit. Our work, on the other hand, handles arbitrary pursuit graph topology
Rendezvous without Coordinates. J. Yu, S. M. LaValle, and D. Liberzon. IEEE
Transactions on Automatic Control, 57(2), page(s): 421-434, Feb 2012.