Informative Path Planning: Overview
 As mobile robots get deployed to perform sensing tasks (e.g., surveillance,
monitoring, scientific exploration), there are usually multiple objectives
that must be properly balanced. The general goal is to plan paths and policies
that best suit the goal of the mission. Often, it is not clear whether
multiple goals can be simultaneously optimized. With the question in mind,
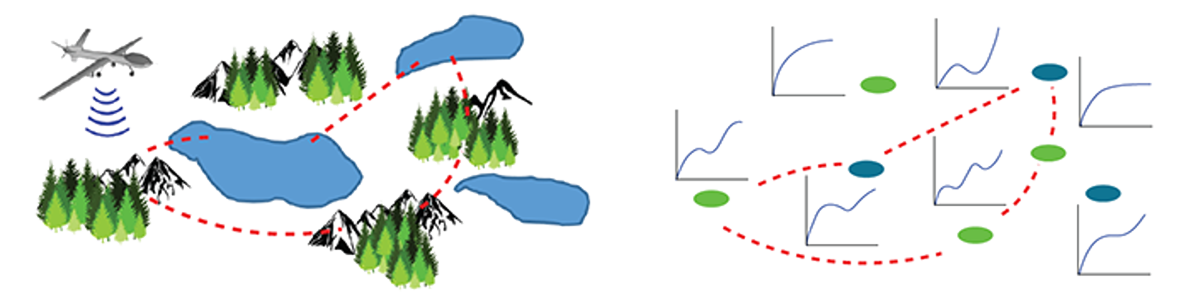
we began examining a broad class of problems in which multiple Poisson processes
are spatially distributed, mimicking temporally-driven random events to be
observed. To observe these events, a mobile robot (observer) must travel to
the event site. Because the events are transient (i.e., time sensitive),
the longer the robot waits at a particular site, the more likely it will be
able to observe the particular event. Therefore, to observe a balanced
portfolio of events, the robots must weigh between frequently traveling between
different sites and staying at each site longer for making more observations.
As it turns out, under proper (and mild) conditions, as established in
this paper,
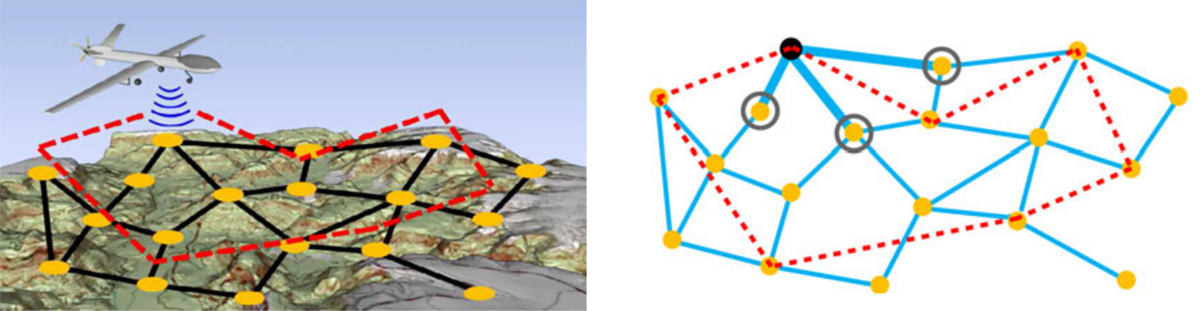
there exists a globally optimal policy for scheduling the trip of the robot
to (i) maximize the number of events observed and (ii) minimize the delay
between consecutive observations of events occurring at the same site.
Assuming a cyclic patrol policy is used, we provide a polynomial time
approximation scheme (PTAS) that computes for any $\varepsilon > 0$ a $(1+\varepsilon)$-optimal
solution for the more general, NP-hard problem. Beside this persistent monitoring problem, we have also studied several related problems including the Correlated Orienteering Problem and the Optimal Tourist Problem.
As mobile robots get deployed to perform sensing tasks (e.g., surveillance,
monitoring, scientific exploration), there are usually multiple objectives
that must be properly balanced. The general goal is to plan paths and policies
that best suit the goal of the mission. Often, it is not clear whether
multiple goals can be simultaneously optimized. With the question in mind,
we began examining a broad class of problems in which multiple Poisson processes
are spatially distributed, mimicking temporally-driven random events to be
observed. To observe these events, a mobile robot (observer) must travel to
the event site. Because the events are transient (i.e., time sensitive),
the longer the robot waits at a particular site, the more likely it will be
able to observe the particular event. Therefore, to observe a balanced
portfolio of events, the robots must weigh between frequently traveling between
different sites and staying at each site longer for making more observations.
As it turns out, under proper (and mild) conditions, as established in
this paper,
there exists a globally optimal policy for scheduling the trip of the robot
to (i) maximize the number of events observed and (ii) minimize the delay
between consecutive observations of events occurring at the same site.
Assuming a cyclic patrol policy is used, we provide a polynomial time
approximation scheme (PTAS) that computes for any $\varepsilon > 0$ a $(1+\varepsilon)$-optimal
solution for the more general, NP-hard problem. Beside this persistent monitoring problem, we have also studied several related problems including the Correlated Orienteering Problem and the Optimal Tourist Problem.
Topics
The Optimal Tourist Problem
Note that OTP does not contain a stochastic element as the somewhat similar persistent monitoring formulation (stated below). It turns out that the non-stochastic nature actually makes OTP actually much harder.
<a id="links" href="/files/YuAslKarRus15IROS.pdf" target="_">paper</a>
Anytime Planning of Optimal Schedules for a Mobile Sensing Robot. J. Yu,
J. Aslam, S. Karaman, and D. Rus. 2015 IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS 2015).
The Correlated Orienteering Problem
Correlated Orienteering Problem and its Application to Persistent Monitoring
Tasks. J. Yu, M. Schwager, and D. Rus. IEEE Transactions on Robotics, 32(5),
page(s): 1106 - 1118, 2016.
Persistent Monitoring of Stochastic Events
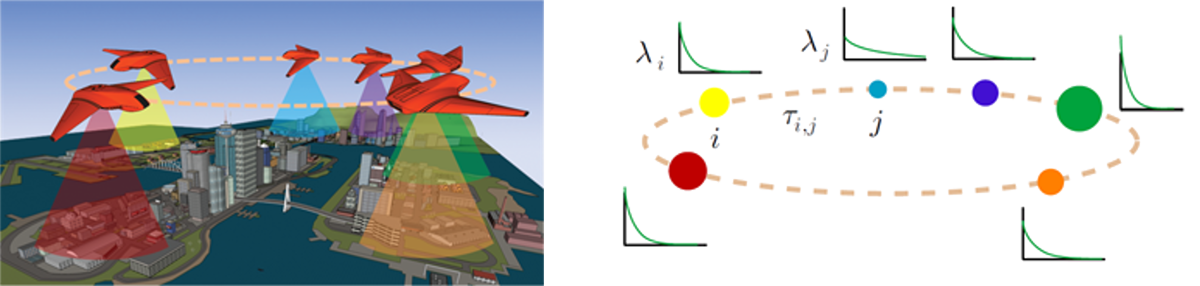
In monitoring such events, the robot seeks to: (i) maximize the number of events observed and (ii) minimize the delay between consecutive observations of events occurring at the same location. We are interested in finding a cyclic patrolling route that that optimizes these objectives in a balanced manner. To tackle the problem, first, assuming the cyclic ordering of stations is known, we prove the existence and uniqueness of the optimal solution, and show that the solution has desirable convergence rate and robustness. Our constructive proof also yields an efficient algorithm for computing the unique optimal solution with linear time complexity. The analysis remains valid when the cyclic order is unknown. We then provide a polynomial-time approximation scheme that computes for any $\varepsilon > 0$ a $(1+\varepsilon)$-optimal solution for the more general, NP-hard problem in which the order of the stations is unknown.
<a id="links" href="/files/YuKarRus15TOR.pdf" target="_">paper</a>
Persistent Monitoring of Events with Stochastic Arrivals at Multiple Stations.
J. Yu, S. Karaman, and D. Rus. IEEE Transactions on Robotics, 31(3), page(s):
521-535, 2015.