Latest ●
Object Manipulation ●
Sensor Coverage ●
Multi-Robot Motion Planning ●
Target Assignment ●
Informative Path Planning ●
Situational Awareness ●
Distributed Consensus
Selected Recent Research
This page was last updated in 2021; we are falling behind in keeping it updated as we are making rapid progress in a few areas. Please check our publications page for recent research.
Running Buffer Minimization

read more ● video ● code ● paper
On Minimizing the Number of Running Buffers for Tabletop Rearrangement. K. Gao,
S. W. Feng, and J Yu. 2021 Robotics: Science and Systems (RSS 2021).
Rearrangement on Lattices

read more ● video ● poster ● code ● paper
Rearrangement on Lattices with Pick-n-Swaps: Optimality Structures and Efficient
Algorithms. J. Yu. 2021 Robotics: Science and Systems (RSS 2021).
Deep Interaction Prediction
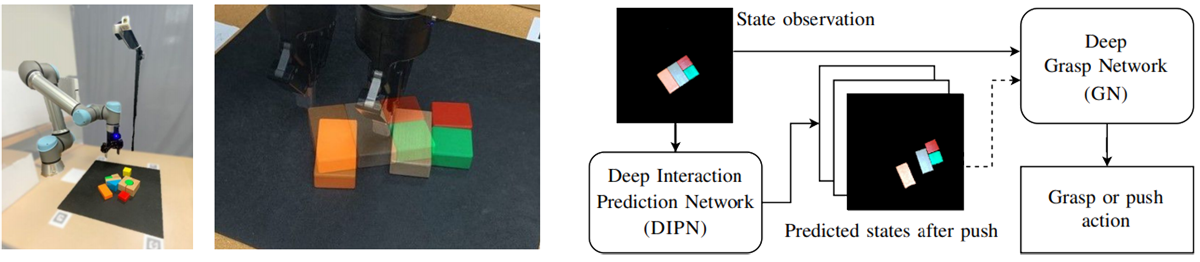
read more ● video ● code ● paper
DIPN: Deep Interaction Prediction Network with Application to Clutter Removal.
B. Huang, S. D. Han, A. Boularias, and J. Yu. 2021 IEEE International Conference
on Robotics and Automation (ICRA 2021).
Globally Optimal Coverage of 3D-Embedded Surfaces
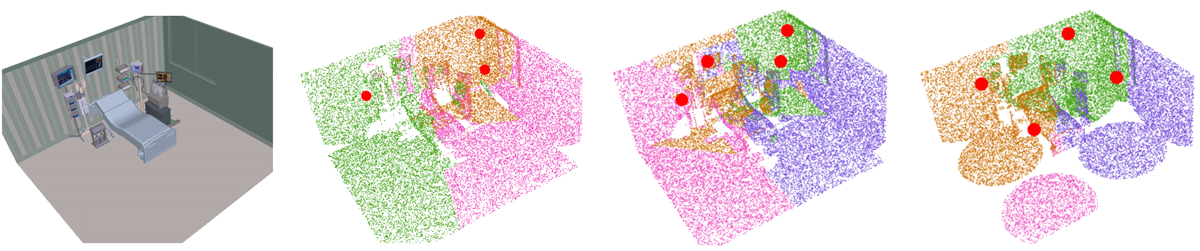
Sensor Placement for Globally Optimal Coverage of 3D-Embedded Surfaces. S. W. Feng,
K. Gao, J. Gong, and J. Yu. 2021 IEEE International Conference on Robotics and
Automation (ICRA 2021).
Spatio-Temporal Splitting Heuristics for MRMP

Spatial and Temporal Splitting Heuristics for Multi-Robot Motion Planning. T. Guo,
S. D. Han, and J. Yu. 2021 IEEE International Conference on Robotics and Automation
(ICRA 2021).
Rubik Table and Stack Rearrangement

Our main contributions are: (1) an algorithm for restoring the order of $n^2$ items stored in an $n \times n$ table using only $2n$ column and row permutations, and its generalization, and (2) an algorithm with a guaranteed upper bound of $O(nd)$ steps for solving both versions of the stack rearrangement problem when $d \le \lceil cn \rceil$ for arbitrary fixed positive number $c$. In terms of the required number of steps, the labeled and unlabeled version have lower bounds $\Omega(nd + nd{\frac{\log d}{\log n}})$ and $\Omega(nd)$, respectively.
On Rearrangement of Items Stored in Stacks. M. Szegedy and J. Yu. Algorithmic
Foundations of Robotics XIV, Springer Proceedings in Advanced Robotics (SPAR),
page(s): 518-833, 2021. Presented at WAFR 2020.